
RoboMatDalías
Te damos la bienvenida al blog que vá a describir el proyecto profundiza del IES Ciudad de Dalías dedicado a la Robótica y las Matemáticas mediante la construcción de unos Robots utilizando el movimiento geométrico ideado por el artista cinético Theo Jansen.
Desde hace ya unos años, nuestro instituto IES Ciudad de Dalías tiene la inquietud de introducir el conocimiento derivado de diversas aplicaciones tecnológicas derivadas de la informática tales como la gestión, la didáctica, la robótica y la programación en el quehacer diario de la vida del centro.
La Programación ha sido incorporada, para complementar a la robótica, en la asignatura de 4º de la ESO TIC que al estar dotada de un horario de 3 Horas semanales, permite cumplir con el curriculo oficial y a la vez ampliar conocimientos en esta materia, muy útiles en este sentido. También en los cursos de 1º y 2º existe una asignatura optativa de iniciación a la informática que cubre necesidades básicas referentes a paquetes ofimáticos comunes e introduce conceptos básicos de programación mediante juegos interactivos.
Como consecuencia, creemos que ha llegado el momento de implicar a mas áreas de conocimiento, ademas de las tecnológicas, en el uso de la programación y robótica como medio para facilitar el aprendizaje de estas y adquirir determinadas competencias muy útiles para según que materia.
Por similitud con procesos tales como el pensamiento estructurado y el razonamiento lógico, claramente es matemáticas el área mas cercana a todo esto y es por ello que pretendemos probar de forma experimental y mediante el profundiza, esta cuestión.
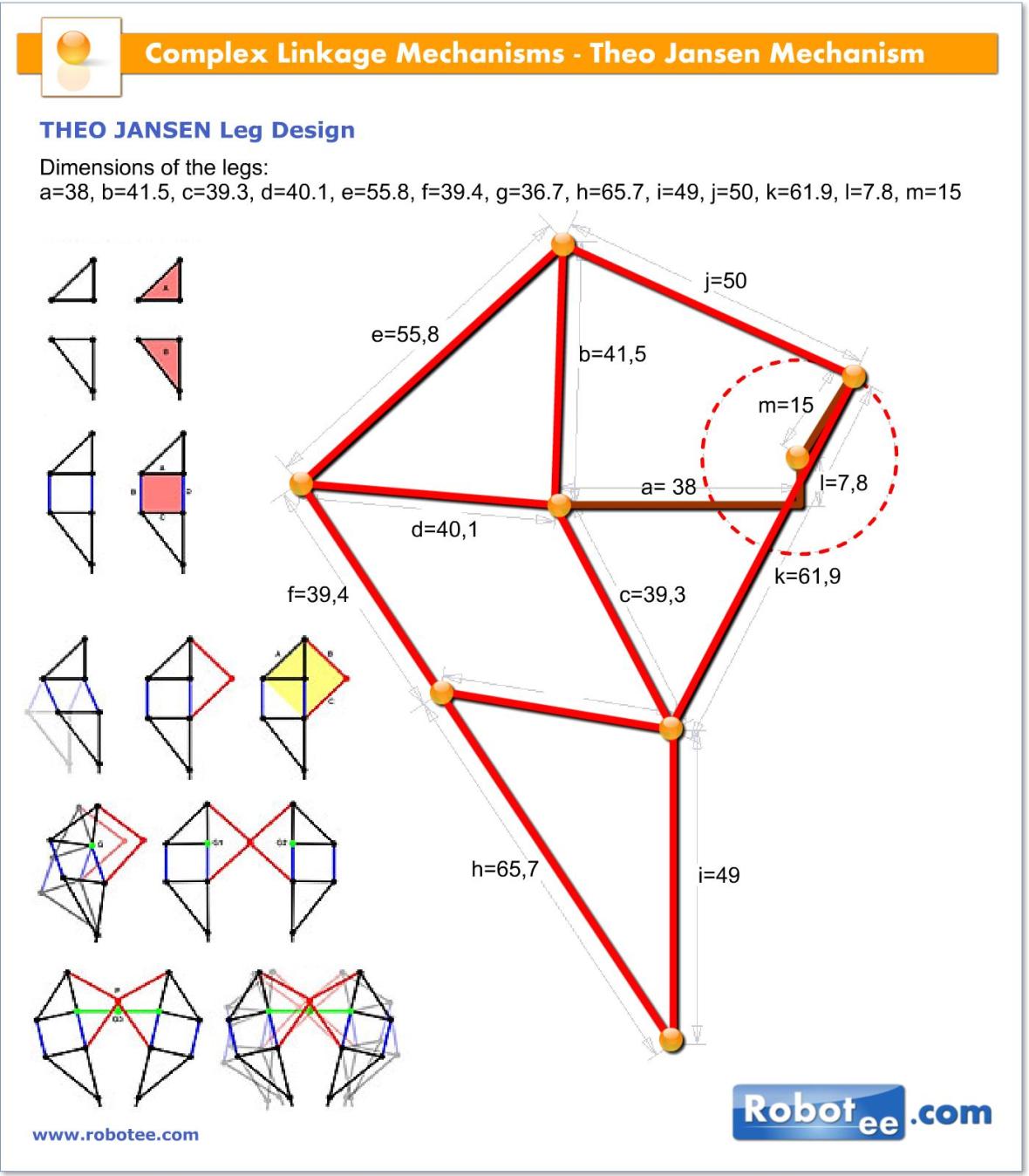
Para ello nos ha parecido muy interesante combinar el aspecto geométrico del mecanismo basado en el pie elemental de Theo Jansen, con la idea de mover una estructura formada por esas patas mediante placas controladoras programables, sustituyendo los típicos robots que se desplazan mediante ruedas por otros mas parecidos a como se desplazan los animales terrestres.
Con ello queremos tocar las dos grandes áreas de conocimiento de este Proyecto:
La base matématica de esta arquitectura creada por este artista cinético, tocando aspectos como:
-
-
La aleatoriedad
-
Las curvas y sus propiedades
-
Las desigualdades triangulares, etc…
-
y conceptos básicos como:
-
-
Medidas
-
Longitud de circunferencia
-
Intersecciones, etc….
-
así que queda clara su gran conexión con la dicha materia
La base tecnológica dividida en dos grandes elementos:
-
HARDWARE del engendro:
-
-
Placas Controladoras:
- ARDUINO por su mas que probada fama como recurso didáctico en la utilización de placas para el control de Robot
- RASPBERRY PI para realizar procesos de inteligencia artificial que nos permitan interactuar con el usuario
-
-
-
Construcción de modelo: Aprenderemos a utilizar una IMPRESORA 3D para la realización de las piezas fundamentales que requieran de cierta complejidad manual
-
-
SOFTWARE del engendro:
-
-
Programación:
- IDE ARDUINO incorporado en los guadalinex y que nos permitirá iniciarnos en la programación de estas placas controladoras y en el manejo de los distintos elementos electrónicos conectados a ella.
- PYTHON incorporado en las Raspberrys con objeto de aumentar el potencial de inteligencia del robot y su puente hacia el Arduino.
-
-
-
Diseño: Aprenderemos a realizar piezas en 3D mediante SOFTWARE 3D y llevar a la práctica los aspectos matemáticos requeridos que hagan que las piezas que formen la estructura funcionen de forma óptima.
-
